
O gigante da mídia social Facebook acaba de anunciar o Habitat 2.0, sua plataforma de simulação atualizada que permite aos pesquisadores treinar robôs em ambientes virtuais. O passo à frente da empresa aqui a aproxima de alcançar a “IA incorporada", ou a tecnologia que pode permitir que os robôs realizem tarefas cotidianas.
Habitat 2.0 é a versão mais recente da plataforma Habitat original do Facebook. E, assim como seu antecessor, o 2.0 permite que os pesquisadores concluam seu treinamento em velocidade enquanto renderizam todos os detalhes de alto nível necessários para treinar completamente os robôs. Esses detalhes incluirão objetos e obstáculos que os robôs podem encontrar em ambientes domésticos, como bancadas, cadeiras, brinquedos e caixas, além de poder navegar em espaços do mundo real em companhia de humanos.
Eventualmente, isso pode significar que esses robôs podem lidar com comandos mais simples, como “carregue a máquina de lavar louça” ou “pegue um refrigerante na geladeira”. As implicações são muito maiores, no entanto, pois também podem ajudar os deficientes visuais a dar uma volta no quarteirão enquanto reconhecem os obstáculos e ajudam o usuário a evitá-los.
Comparado ao treinamento físico, o treinamento virtual economiza tempo e dinheiro e pode ser mais acessado por quem quiser aproveitá-lo. O Facebook espera que o Habitat facilite o treinamento rápido de robôs assistivos, especialmente aqueles projetados para lidar com tarefas domésticas chatas (vou levar dois, obrigado!).
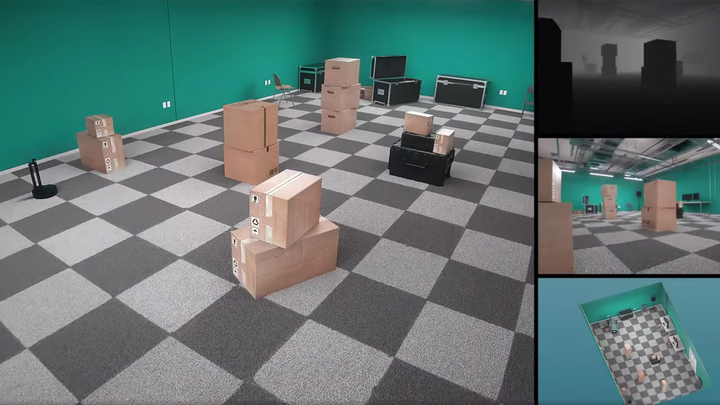
Para ter sucesso, no entanto, os robôs precisarão primeiro aprender a navegar em uma variedade de superfícies, layouts de salas e outros elementos que imitam adequadamente os ambientes do mundo real. É precisamente aí que o Habitat 2.0 é útil. Ele pode treinar rapidamente esses robôs em todos os tipos de ambientes (como casas de vários andares e salas de conferências de escritórios), respondendo por toneladas de obstáculos e outras variáveis, em vez de passar meses ou anos deixando-os vagar de casa em casa na vida real.
O Habitat 2.0 também está treinando para outro desafio difícil: interação com objetos. Plataformas anteriores, como Replica, usavam conjuntos de dados estáticos que não permitiam isso, apesar de ser uma parte importante do treinamento. Mas com o 2.0, os robôs agora podem “praticar” rolar sobre tapetes, pegar escovas e assim por diante.
Dhruv Batra, cientistas pesquisadores do Facebook, declarou: “Com este novo conjunto de dados e plataforma, os pesquisadores de IA podem ir além da construção de agentes virtuais em ambientes 3D estáticos e aproximar-se da criação de robôs que podem executar tarefas úteis de maneira fácil e confiável, como estocar a geladeira., carregar a máquina de lavar louça ou buscar objetos sob comando e devolvê-los ao seu lugar habitual.”
A réplica também foi atualizada para o ReplicaCAD. Sua humilde biblioteca de 18 digitalizações 3D foi expandida para mais de 110 layouts de área de estar e inclui quase 100 objetos; ele também pode adicionar desordem realista e permitir que os robôs “interajam” com portas e outros elementos.
A plataforma também é várias ordens de magnitude mais rápida do que a maioria dos outros simuladores 3D existentes. Enquanto outras plataformas podem simular apenas um robô assistivo interagindo a 400 passos por segundo (SPS), o ReplicaCAD lida facilmente com 1.200 SPS (com um máximo de 26.000 com GPUs extras). Será interessante ver como será o treinamento e se conseguirmos robôs assistivos de nível de consumidor para lidar com as tarefas domésticas.
Fonte: Facebook